Legged Robots
When wheels have dominated the robot world and seem extremely popular, innovators are struggling to find a decent replacement for wheels which would work in any kind of an environment. Adding legs to robots might be a solution for robots which runs on unprepared terrain.
Legs are not new to humans or animals but building legs for a robot is a complex process. The normally noticed and ignored fact is how a baby learns to walk and the sheer learning curve involved. If we, the intelligent humans take years to learn to walk, imagine creating legs for a robot and teaching it how to walk. Although there is an extensive research going on in the field of legged robots, researchers are still struggling to construct a legged robot which can replicate human walk, or for that matter any animals…
Adding legs to robots is a complex task, but there are many advantages of legs over wheels and the reason most living organisms in our world have legs, so that they can adapt to any environment and terrain (except for bacteria which uses flagellum, a biological wheel). Following are few advantages of legs over wheels:
- Legged robots or vehicles can navigate on any kind of surfaces which is inaccessible for robots with wheels. In the previous section, we discussed different kinds of wheels for different surfaces, but no standard works on all surfaces. Also, wheels are designed to work on prepared surfaces like smooth surfaces, roads, rails, etc.
- Legged robots can jump or step over obstacles whereas wheels need to somehow travel over it, or take a different path
- Wheels require a continuous path to travel whereas legs can step over isolated paths and move on. For example, if a particular city is hit by an earthquake, then the surface with a continuous path. This is where legged robots come into picture, although tracked wheels can manage up to a “certain” extent.
- Legged robots can avoid undesirable footholds which cannot be avoided in a wheeled robot
- Legged robot helps us in exploring human and animal locomotion
- Once we move off from our modified habitat into rough, rocky, sandy, steep and undesired terrain, we understand that our brilliant invention of wheels turn out absolutely useless
- Lastly, the excitement of replicating a human or an animal and try to challenge nature
Now that you know the advantages, why not jump out of your cozy bed and start making a legged robot? You may not prefer to. There are many reasons why legs are not considered a replacement for wheels, and that is why most man-made vehicles have wheels. Some of the basic advantages of wheels are listed below:
Legs over Wheels in robots
- First and foremost reason is that wheel based robots or vehicles are extremely easy to design and build whereas leg based robots require complex mechanics and computation to maintain equilibrium, orientation, efficiency and speed.
- Building a wheeled robot is cheaper than its legged counterpart
- Wheel based vehicles or robots travel faster than leg based robots and more energy efficient. (Few researchers argue that leg based robots are more energy efficient. We will stick to the reality until studies reveal that legs are more energy efficient)
- Legged robots require the system to generate an appropriate Gait to move, whereas wheels just need to roll. If you wondering what Gait is, Gait is pattern of movement of limbs in animals and humans used for locomotion over a variety of surfaces. The same concept is used to design the pattern of movement of robots on different surfaces.
Dynamic Stability vs. Static Stability
What is stability? We all know what stability is; but to give it a definition, “Stability means an equilibrium which can be measured and observed”. Stability is especially important in legged robots. There are two kinds of stability – Static and Dynamic
Static Stability
A statically stable robot is well balanced and does not fall over when standing. This means that the center of gravity of a robot is within its ground contact base. Let us take an example of a robot with three legs arranged in the form of a triangle. This robot does not require any kind of movement to stand stable and can stand balanced as long as the center of mass is within the triangle. This triangle is called the "support polygon" which is a horizontal region over which the center of mass lies to achieve static stability. If the previous statement is confusing, just understand that support polygon is a projection between all the support points of a robot onto the surface it is standing.
The minimum number of ground contact points required for a statically stable robot is three.
However, achieving static stability with two legs or two wheels is not an easy task. Humans although may seem, are not statically stable. Our muscles and nerves control our balance and make it seem an effortless stability. This is the same reason why a baby takes a year or two to learn how to stand.
Dynamic Stability
 Dynamic stability is where stability is achieved on movement. Imagine a robot with only one leg which hops from one place to another and is stable unless it keeps moving, but falls over if it stops moving.
Dynamic stability is where stability is achieved on movement. Imagine a robot with only one leg which hops from one place to another and is stable unless it keeps moving, but falls over if it stops moving.
Although dynamically stable robots are harder to control, they are more energy efficient and move faster than statically stable robots.
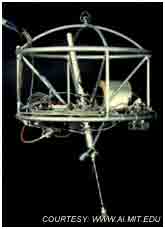
Image shows dynamically stable 3D one legged Hopper from MIT leg laboratory
To get the best of both worlds, a designer should think of designing a statically stable robot which incorporates dynamically stable robot’s walking patterns (or gait). Let us take an example of a robot with 4 legs – Tetrapod. Since there are 4 contact points to ground, the robot is stable while standing. On movement, the robot can lift one leg at a time and move forward which makes it a slow walking robot. Now imagine if it can move by lifting two legs at a time and hop from one place to another. Since there are only two contact points to ground, the robot is dynamically stable while moving and also energy efficient.
One-legged robot
The minimum number of legs for a robot to have a ground contact is one. One legged robots are generally designed to be hopping robots (Not sure if there is any other mechanism for them to move). So what should a hopping robot do? It has to hop all the time and if it stops, then it falls over. These robots are dynamically stable and balance themselves by changing its center of gravity and applying corrective forces to avoid falling when disturbed. The advantage of only one leg is that they can hop over and move in any kind of terrain as they take a running start and jump over any obstacles, sometimes larger than its ideal step. Since there is only one leg, designers can ignore leg coordination as there is only one controllable leg. Also, one legged robots are more energy efficient compared to robots with more number of legs. The drawback is their complex design and control.
A typical one legged robot can be constructed by controlling robot posture, hopping height and hopping distance.
 Robot Posture: Robot posture should be controlled during running such that the body remains erect at all times, especially when the robot comes down after a jump.
Robot Posture: Robot posture should be controlled during running such that the body remains erect at all times, especially when the robot comes down after a jump.
Hopping Height: Hopping robots generally integrate springy legs; a motor or an actuator stimulates the leg to generate a bouncing motion. Greater the height, greater the energy required, but can jump over bigger obstacles.
Hopping Distance: Hopping distance and the hopping height determines the robot velocity. Greater the distance covered, faster the robot.
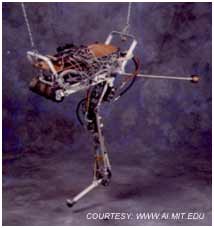
MIT has done a lot of research on one legged robots. Image shows Uniroo from MIT Leg Laboratory.
Two legged robot (Biped)
Since the beginning of building robots, studies on biped robots (robots with two legs) have been continuously carried out, especially towards developing humanoids.  Creating a robot which resembles a human would mean that they can be used in the same human working environment without making any changes. This means they are built to imitate humans and human behavior.
Creating a robot which resembles a human would mean that they can be used in the same human working environment without making any changes. This means they are built to imitate humans and human behavior.
Biped robots are dynamically stable and require complex control algorithms to balance them when standing. “ASIMO” from Honda and “QRIO” from Sony are excellent examples of biped which can walk, run, stand and even dance. These robots maintain stability by planning their footsteps. Each step is calculated and the weight is moved in such a way that the next step would still make the robot stable. An advantage of biped is decreased number of legs which leads to less weight and less coordination between legs.
Three legged robot (Triped)
Three legged robots are statically stable since there are three contact points to ground.  For a robot to be statically stable, it requires a minimum of three contact points to ground.
For a robot to be statically stable, it requires a minimum of three contact points to ground.
Few robots like STriDer (Self-excited Tripedal Dynamic Experimental Robot) from RoMeLa are built with three legs. Since there are no naturally occurring three legged animals (at least not discovered yet), people rarely invest time and money in building a three legged robot.
Four Legged robot (Tetrapod)
Walking with four legs is common for most animals and there is a good reason to replicate this in robots. Four legged robots are statically stable and the walking pattern of a four legged robot can be designed in different ways:
- One leg at a time: At any point there are three contact points to surface and the robot maintains static stability while standing or moving. Moving one leg at a time makes your robot slower and expensive on the resources, but keeps it stable.
- Alternating Pair: In this approach, alternate legs are moved as if two biped robots are connected together. At any time the robot has two surface contact points creating a dynamically stable robot. Faster and efficient, but less stable compared to the first approach.
Six legged robot
More number of legs provides greater stability. Hexapods (robots with 6 legs) possess greater static stability while moving and while standing. These robots are also biologically inspired as there are many insects with 6 legs. If you have observed carefully, most 6 legged robots mimic spiders.
Hexapods can either mimic Wave gait (wave pattern) or follow Tripod gait.
 Wave gait: In this approach, front two legs are moved first followed by the middle two legs, and then the last two legs. Once all the three pairs of legs are moved, the body is moved forward to complete one movement. At any point of time, there are four legs touching the ground (or surface). Wave gait requires four steps for one complete movement
Wave gait: In this approach, front two legs are moved first followed by the middle two legs, and then the last two legs. Once all the three pairs of legs are moved, the body is moved forward to complete one movement. At any point of time, there are four legs touching the ground (or surface). Wave gait requires four steps for one complete movement

Tripod gait:  In tripod gait, at any point of time there are three legs touching the ground. Alternate legs move forward on either side; i.e. the front and rear leg on one side and the middle leg on the other side are moved first. Next the remaining three legs are moved. Body is moved forward and the entire process requires only three steps and is clearly much faster than wave gait. However, tripod gait requires more leg coordination increasing complexity.
In tripod gait, at any point of time there are three legs touching the ground. Alternate legs move forward on either side; i.e. the front and rear leg on one side and the middle leg on the other side are moved first. Next the remaining three legs are moved. Body is moved forward and the entire process requires only three steps and is clearly much faster than wave gait. However, tripod gait requires more leg coordination increasing complexity.
Conclusion: Similar to wheeled robots, there are different ways legs can be incorporated in robots. If you are starting off with robots, then a big no-no to legged robots, and especially applicable for single legged and two legged robots. While three or more legged robots are comparably easier, they are still a nightmare for a beginner.
Do you have anything to say?
Visit the Forum to discuss, learn and share anything related to robotics and electronics !!







