Classification of robots
Before we plan to design and build a robot, we need to understand the purpose of a robot. Do not jump into conclusion that you need to build a complete and complicated robot in a day; they are complex, and at least for a beginner it is a terrifying thought. Read about the different types of robots available and start off with a simple design.
There are many different kinds of robots available, each created for different tasks and behavior, and works on different platforms. Robots can be built for entertainment, knowledge, competitions, domestic help, industrial uses, surveillance etc. Each of these robots can be classified as autonomous, controlled or semi-autonomous based on the way they are controlled.
Autonomous vs. Remote controlled robots
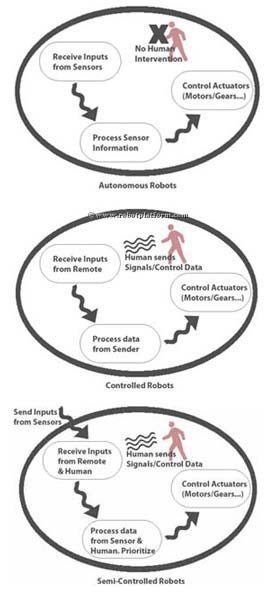
Autonomous robots
Autonomous robots as the name suggests, works autonomously. They have preprogrammed directions and are given a choice of taking decisions based on situations and surroundings. An Artificially intelligent robot can even learn certain behaviors and act accordingly (Artificial intelligence in itself is a very vast topic and the reason we will not delve into it now).
Autonomous robots can be as simple as an obstacle avoider, or as complex as an intellectual humanoid. However due to restrictions in power, size and intelligence these robots may not be good enough to perform complicated tasks.
Controlled Robots
These are robots that require human intervention to accomplish a task. They can either be wire controlled or remote controlled that are guided to perform any kind of complicated activities. A remote controlled robot can be programmed and guided to perform dangerous and complex tasks without being on the spot.
Semi-Autonomous robots
These robots take the best of both worlds. The intelligence built in helps them perform simple tasks and take simple decisions. For complex tasks however, human intervention may be required. Generally the program is designed to take intelligent decisions on its own until any human input.
Virtual robots
There are also virtual robots which are computer programs designed to simulate a real robot. Robot Simulators, Chatbot, Web crawlers are all examples of virtual robots. Since they do not follow our robot definition, we will keep them out of this list for the time being.
Robots can be further classified, based on the way and the environment it is designed to work. Follow the links below to understand each of those classifications in detail.
Do you have anything to say?
Visit the Forum to discuss, learn and share anything related to robotics and electronics !!







