Wheeled Robots
God created legs for locomotion and man created wheels for the same purpose, which is one of the greatest inventions in human era. Wheels are your best bet for robots as they are easy to design, implement and practical for robots that require speed. They also do not suffer from static or dynamic stability as the center of gravity of robot does not change when they are in motion or just standing still and do not require complex models, designs and algorithms. The disadvantage is that they are not stable on uneven or rough terrain and also on extremely smooth surfaces as they tend to slip and skid.
Types of Robot Wheels
There are different kinds of wheels to choose from, for a Wheeled Mobile Robot (WMR)
Standard/Fixed wheel
This wheel has two degrees of freedom and can traverse Front or Reverse. The center of the wheel is fixed to the robot chassis. The angle between the robot chassis and wheel plane is constant. Fixed wheels are commonly seen in most WMR’s where the wheels are attached to motors and are used to drive and steer the robot.
Orientable wheel
These wheels are mounted to a fork which holds the wheel in place. Orientable wheels are normally used to balance a robot and very unlikely to be used to drive a robot. There are two kinds of Orientable wheels: Centered and Off-centered Orientable wheels:
- Centered Orientable:
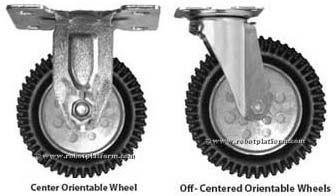 In this wheel design, the vertical axle of the wheel passes through the center of the wheel. The design is simple and you just need a couple of screws to tie the wheel to the robot base.
In this wheel design, the vertical axle of the wheel passes through the center of the wheel. The design is simple and you just need a couple of screws to tie the wheel to the robot base.
- Off-centered wheels (a.k.a castor wheels) are a bit different. The vertical axis does not pass through the center of the wheel, but is slightly off-centered. Some designs include a swivel joint between the wheel and the fork so that it can rotate freely with 360° of freedom. One of the biggest drawbacks of these swivel wheels is flutter. A flutter happens when the wheel is not in contact with the ground and rotates freely in any direction. Upon contact with ground, they can be oriented in any direction and can move in any direction.
Ball wheel
These ball wheels contain a spherical metal or nylon ball (or any hard spherical material these days) positioned within a holder. The ball has 360° of freedom and is normally used to balance a robot. The disadvantage is that these castors usually have high traction and requires more power to push and support the driving wheels. They are also not suitable for uneven, dusty and greasy surfaces. Ball wheels are also generally referred to as "castor ball wheels".
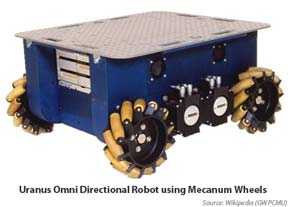
Omni wheels
The best choice for a robot that requires multi-directional movement. These wheels are normal wheels with passive wheels (rollers) attached around the circumference of the center wheel. Omni wheels can move in any direction and exhibits low resistance when they move in any direction. The small wheels are attached in such a way that the axis of the small wheels are perpendicular to the axis of the bigger center wheel which makes the wheel to rotate even parallel to its own axis. Omni wheels are sometimes known as Swedish wheels and can be used to both drive and steer a robot. Mecanum Wheel is also a type of Omni wheel with the exception that rollers are attached at 45° angle around the circumference of another bigger wheel.


Conclusion
The best wheel for your robot depends on the design and requirements. Fixed wheels are good for simply connecting wheels to a motor and driving or steering. Orientable and spherical wheels are good for balancing a robot (especially when two wheels drive and you require a third balancing wheel; also known as auxiliary wheel). Swedish wheels are good for both driving and steering, but come with their disadvantages. They are very expensive with poor efficiency as not all wheels rotate in the direction of robot. They also cannot be used for positional control due to slippage of wheels.
Do you have anything to say?
Visit the Forum to discuss, learn and share anything related to robotics and electronics !!







